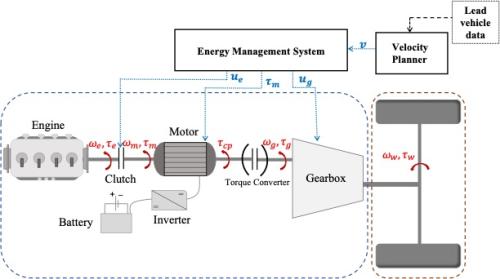
Powertrain Electrification for Autonomous Vehicles
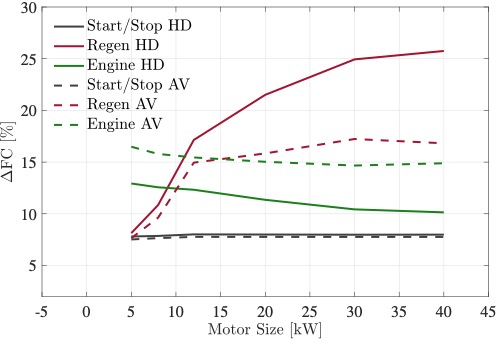
The powertrains of today's hybrid electric vehicles (HEVs) are developed for human drivers and, therefore, may not be the optimum choice for future Autonomous vehicles (AVs), given that AVs can accurately manipulate their velocity profile to avoid unnecessary energy loss. In this work, we closely examine the necessary degree of hybridization for AVs compared to human drivers by deploying real-world urban driving profiles and generating equivalent AV drive cycles in a mixed autonomy scenario. We solve the optimal energy management problem for HEVs with various motor sizes from the automotive market, and demonstrate that while human drivers typically require a motor size of around 30 kW to fully benefit from hybridization, AVs can achieve similar gains with only a 12 kW motor. This greater benefit from a smaller motor size can be attributed to a more optimal torque request, allowing for higher gains from regenerative braking and a more efficient engine operation. Furthermore, We investigate the benefits of velocity smoothing for both traditional cars and HEVs and explore the role of different mechanisms contributing to fuel consumption reduction. Our analysis reveals that velocity smoothing provides greater benefits to HEVs equipped with small motors compared to non-hybrid vehicles and HEVs with larger motors.
- S. Nazari, N. Gowans, and M. Abtahi, "Powertrain Hybridization for Autonomous Vehicles", Submitted to IEEE Transactions on Transportation Electrifications.
| 
|
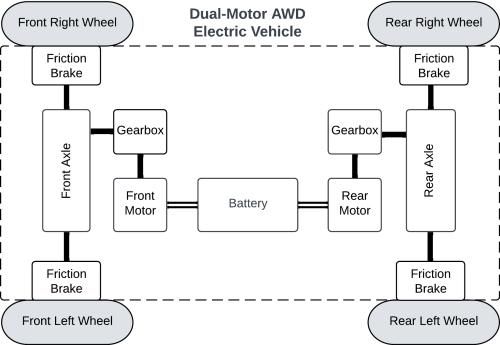
Control of Electric Vehicles
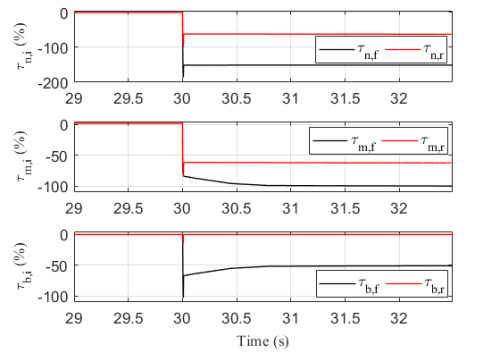
Regenerative braking is one of the main advantages of electric propulsion systems. In such systems the vehicle brake controller has to prioritize safety while maximizing the recovered energy at all time. This paper proposes a two-step hierarchical brake controller for a dual-motor all-wheel-drive electric vehicle. In the first step a novel sliding mode controller (SMC) generates the total braking torque on each axle to independently control the slip on the front and rear wheels. In the second step the torque split controller assigns motor torques to maximize the recovered energy. The proposed SMC controller accounts for the non-linearities in vehicle dynamics and tire model, and considers the weight transfer due to vehicle deceleration. Using simulations, we show that while the traditional SMC formulation is not effective during emergency braking scenarios, the proposed formulation successfully generates control commands to bring the vehicle to a stop position in minimum distance. Furthermore, our controller is able to maintain both wheels in the stable slip region, even when starting from a locked position. The performance of the proposed controller is evaluated for an emergency braking scenario and on an aggressive segment of the US06 cycle.
- A. Majumdar and S. Nazari, "Sliding Mode Wheel Slip Control for Regenerative Braking of an All Wheel Drive Electric Vehicle", ASME DSC Letters, 2023
| 
|
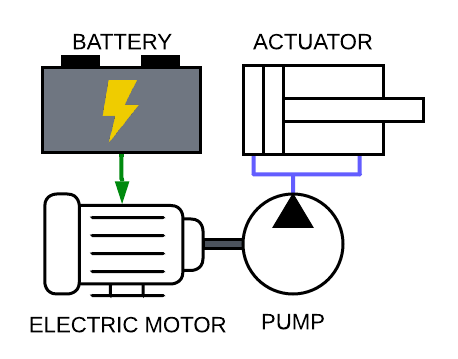
Electrification of Off-Road Vehicles
We study different challenges for electrification of off-road vehicles. Although significant development has been made to electrify on-road vehicles, for off-road vehicles, particularly heavy-duty construction machinery, progress has been slow. The wide range of usage, rough operating conditions, and harsh environments pose unique challenges to electrification. Large vehicles with high power demands require significant battery capacity and remote locations make charging difficult. In this research we seek solutions to address various aspects of this problem.