Data-Driven Modeling for Vehicle Dynamics
This research focuses on learning accurate and computationally efficient models of vehicle dynamics using data-driven techniques. Traditional modeling approaches rely on first-principles or manual system identification, which can be time-consuming and limited in generalizability. In contrast, data-driven frameworks offer scalable and adaptive alternatives.

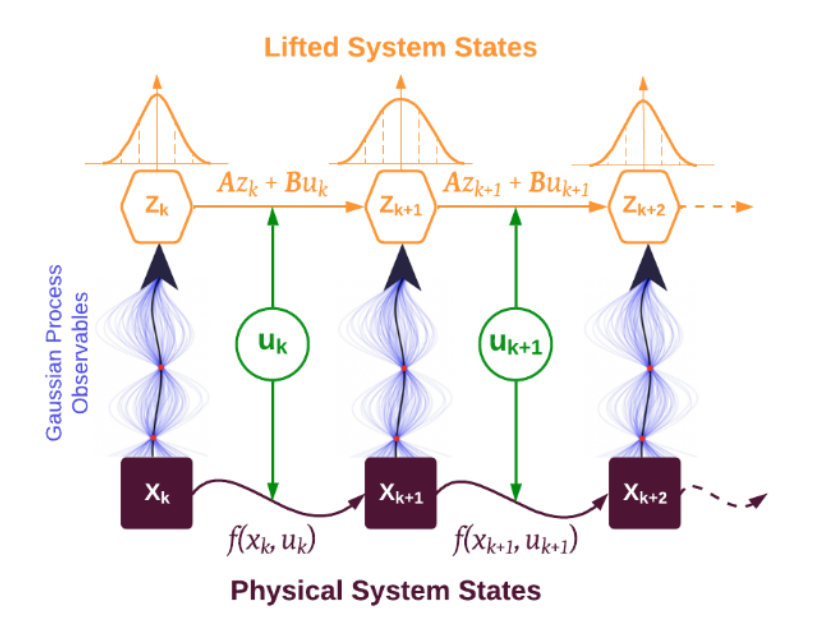
One core effort involves the development of Koopman operator-based models, which lift nonlinear vehicle dynamics into a higher-dimensional space where they can be approximated linearly. To achieve this, deep autoencoder architectures are designed and trained in PyTorch, capturing complex state representations directly from time-series data.
These models are integrated with Model Predictive Control (MPC) frameworks to enable high-performance trajectory planning and decision-making for autonomous vehicles. The approach improves the accuracy of predictive models and reduces the tuning burden associated with traditional control strategies.
By combining deep learning with operator-theoretic foundations, this work bridges the gap between raw data and control-ready dynamic models.