
Position Title
Mohammad Abtahi
Position Title
Mohammad Abtahi
Bio
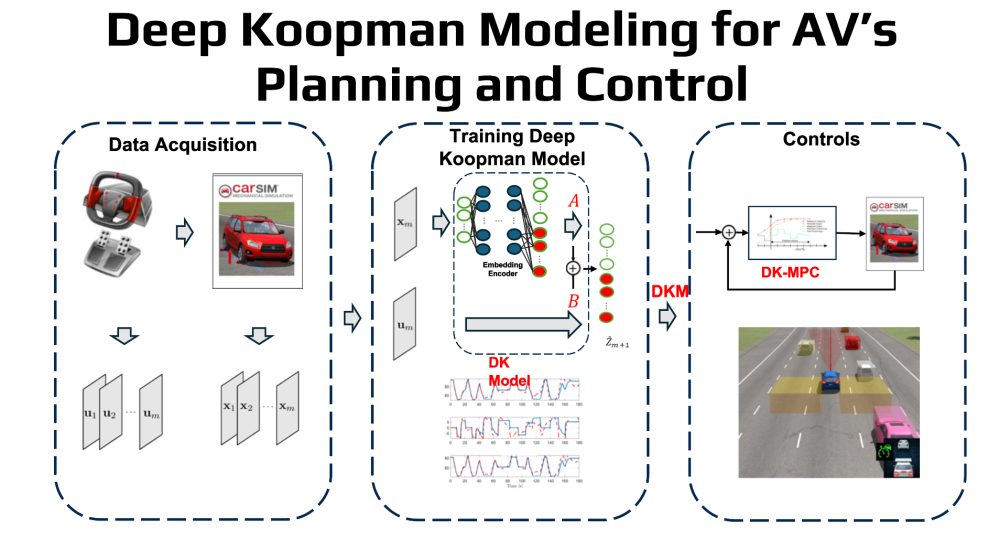
Mohammad’s research focused on developing a physics-informed, data-driven algorithm leveraging Koopman Operator
theory.
His work involves designing and implementing deep autoencoder architectures in pytorch to model high-
dimensional state space models. These models support the development of Model Predictive Control (MPC) strategies,
enhancing real-time path planning and decision-making capabilities for autonomous vehicles.
Education and Degree(s)
- Ph.D. Candidate in Mechanical Engineering at University of California, Davis
- M.Sc. in Mechanical Engineering at University of California, Davis
- B.Sc. in Mechanical Engineering at Sharif University of Technology
Publications
- An Automatic Tuning MPC with Application to Ecological Cruise Control M Abtahi, M Rabbani, S Nazari - IFAC-PapersOnLine, 2023
- Powertrain Hybridization for Autonomous Vehicles: Fuel Efficiency Perspective in Mixed Autonomy Traffic S Nazari, N Gowans, M Abtahi, M Rabbani - IEEE Transactions on Transportation Electrification, 2024