
Position Title
Armin Abdolmohammadi
Position Title
Armin Abdolmohammadi
Bio
Armin’s research focuses on the intelligent control of wheel loaders, integrating reinforcement learning and digital-twin simulations to enhance autonomous operation.
His work involves soil parameter identification to improve controller adaptability and precision, alongside the integration of reinforcement learning algorithms for optimal decision-making in real-world scenarios.
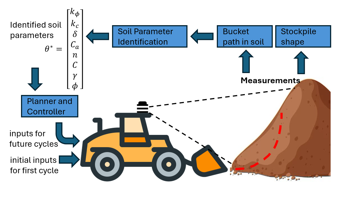
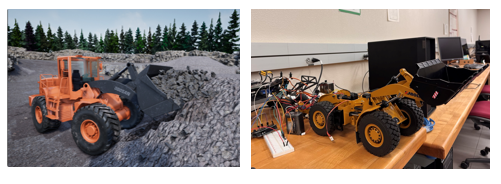
Armin is also developing a high-fidelity digital-twin environment using Algoryx for realistic gravel modeling, enabling accurate simulation and testing of control strategies. Additionally, he is working on a 1/14th scale RC wheel loader, implementing and validating advanced controller designs for real-world applications.
Education and Degree(s)
- Ph.D. Candidate in Mechanical Engineering at University of California, Davis
- M.Sc. in Mechanical Engineering at University of California, Davis
- B.Sc. in Mechanical Engineering at Sharif University of Technology
Publications
- Multi-Step Deep Koopman Network (MDK-Net) for Vehicle Control in Frenet Frame M Abtahi, M Rabbani, A Abdolmohammadi, S Nazari - arXiv preprint arXiv:2503.03002, 2025
- Sizing and Life Cycle Assessment of Small-Scale Power Backup Solutions: A Statistical Approach A Abdolmohammadi, A Nemati, M Haas, S Nazari - IEEE Access, 2024